Willis has posted a beautiful satellite photograph of the Dulan region upon which I’ve marked the locations of Delingha, Dulan and the Gou et al 2007 sample location. I’ve also posted up several location maps discussed recently which are clarified by reference to the satellite photo.
Something fun about this picture – the Dunde ice cap is to the NW of Delingha west of the little lake N of Delingha. I hadn’t fully appreciated the degree to which Dunde was off in the desert.

Update: here’s another version of this map from an archaeological website with the roads marked on. Dunhuang is marked towards the top left corner. Both Delingha and Dulan are on lesser branches of the Silk Road – the main route passing to the northwest of the Qilianshan mountains between the mountains and the desert (the Hexi corridor).

Next here is the location map for Shao et al showing sample locations for the DLH, WL and XRD sites. The DLH sites are located in the brownish-looking Zhongwulong Mts, which are located to the north of Delingha facing south. The road from Qinghai Lake to Dunhuang via Delingha appears to go along the side S of this range. Wulan is between Delingha and Dulan and the WL sites would be in the brownish-looking range to the north of Dulan.
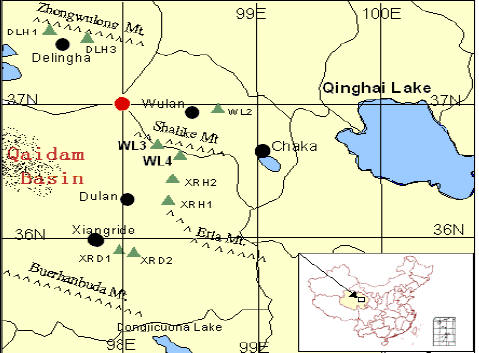
Caption: Location map from Shao et al presentation (with the tree in desert closing slide)
Next here is the location map from Sheppard et al 2004. This shows the location of the Dunde ice cap (which ties down the identification proposed above.) The Sheppard et al sample sites are in the brownish-looking mountains north of Dulan.

Finally, here is the location map from Gou et al 2007, which twq proposed to us as evidence that Dulan junipers could be used as a temperature proxy, notwithstanding the explicit statements by Sheppard et al, Shao et al and Zhang et al that Dulan junipers had strongest correlations to precipitation. If you compare this location map to the satellite photo, you can see the gorge of the upper Yellow River. The appearance of the Gou et al site is much greener than the sites of the Dulan junipers. As a non-dendroclimatologist (a status which dendroclimatologists emphasize), I am inclined to interpret the green appearance as due to precipitation and interpret this as contrasting with the brown appearance of the desert. But, hey, the Team might interpret this differently – maybe the brown color is a teleconnection with the Congo or Antarctica, you never know.






{kind=link}
10 Comments
Surely the last word here should be “precipitation”?
Bump. Important typo here, Steve M.
Steve:
You said
I assume you meant
Steve, looking at the photo you will also note the dune fields covering a large part of the NE quadrant of the photo. It would appear the Dulan site is on the boundary of the continental weather influence (cold, dry) from the NW and the tropical cyclone systems (warm, precip) from the SE, correct?
Here’s a diagram from Araguas showing this area as close to borders of 3 air types: ARctc, SE PAcific and CEntral Asia.
Well I am not an expert but during ice ages the Saharha desert and Sahel is streched about further 1000 km than it is today.
Wasn’t the Sahara more “green” during Holcene optimum?
Maybee more desert today is a “sign” of a colder Earth?
I need some elevation markings of the whole area in order to understand the whole thing.
It might not be about precipitation only but also about temperature and treelines etc etc..
I’ve added another version of this photo from a Japanese archaeological website which shows the roads on a very similar photo ( a little greener version and with the glaciers more distinct)
The below is a paper discussing the relationship between CRU data covering China and Chinese meteorological and historical data during the last 100 years. There is excellent agreement (0.84) between these annual two independent (before 1950) temperature series. 英国CRU é«˜åˆ†è¾¨çŽ‡æ ¼ç‚¹èµ„æ–™æ?示的20 世纪ä¸å›½æ°”候å?˜åŒ– – æ¯?组 2 个 »
闻新宇, 王ç»?æ¦ï¼Œ 朱锦红 – 大气科å¦, 2006 – scholar.ilib.cn
万方数æ?®èµ„æº?系统. å¤§æ°”ç§‘å¦ CHINESE JOURNAL OF ATMOSPHERIC SCIENCES 2006
Jon Anders, the Sheppard map includes heights of some mountains in the area.
Dulan can be found on Google earth as Qagan Us @ 36 17 07 N, 98 04 21 E. Tree cover is interesting in the region. Mostly confined to higher mountain slopes, yet near the Dunde region more extensive on the northern slopes than southern.
This is a truly inhospitable region and from the general lack of greenery I would venture that precipitation would be THE deciding factor here. Sand deserts, rocky mountains, rocky plains abd many large salt flats, this region has it all.